
Too many designers spend time and money on high accuracy position and speed devices, such as rotary encoders, only to compromise their performance by using an inappropriate shaft coupling.
Shaft encoders are accurate instruments, capable of extremely high angular resolution and are normally supplied as servo or flange mounted units, with protruding shafts. Even the smallest amounts of misalignment between driven and driving shafts can produce side and end loads which will inevitably reduce the life of the internal bearings and the accuracy of the encoder.
Drives which introduce side loads, such as direct gear couplings, should not be used, likewise manufacturing rotary encoders with larger bearings provides no universal solution. The increase in bearing friction also increases torque, inertia and in certain cases shaft windup, which can cause serious limitations in applications, especially where the instrument must respond accurately to acceleration, deacceleration or rapid bidirectional stops and starts. Neither is it a solution to couple the encoder via a long shaft whose flexibility accommodates alignment errors, since this potentially introduces vibration problems and again greatly increases inertia and windup.
Except in specialised cases where the encoder is integrated with other system components, it is necessary to provide a torsionally stiff, flexible interface between the shaft encoder and the input variable. Usually this takes the form of a flexible shaft coupling. Inevitably, the shaft coupling will impose its own limitations on the system in the form of side loads, increased torque, introduced errors. There are about thirty five different flexible coupling designs, but in ABSSAC’s 4 decades of experience there are very few that are suitable for use with rotary encoders.
A rough rule of thumb can be applied when choosing the correct type of flexible shaft coupling for use with rotary encoders. The following types of coupling should be avoided;
• Couplings which do not provide unconditional constant velocity.
• Designs that are incapable of simultaneously accommodating all combinations of angular and lateral shaft misalignment.
• Coupling designs with insufficient torsional stiffness,
• Designs that transfer excessive side loads on to the encoder bearings.
• A mechanical set up that has insufficient axial compliance.
• Designs that introduce mechanical backlash into the system.
• Shaft couplings that introduce, high inertia, friction or vibration
• Designs that are not suitable to the applications environment
Although not one single design of shaft coupling is the answer to all rotary encoder connection problems, the mechanical designer should base his choice on the particular requirements of his system. Here we look at five coupling styles and their suitability. We start with the standard universal joint design and although this design of shaft coupling is not ideal for encoder use they examplify the basic principles of rotary connection.
 Hooke's joint
Hooke's joint
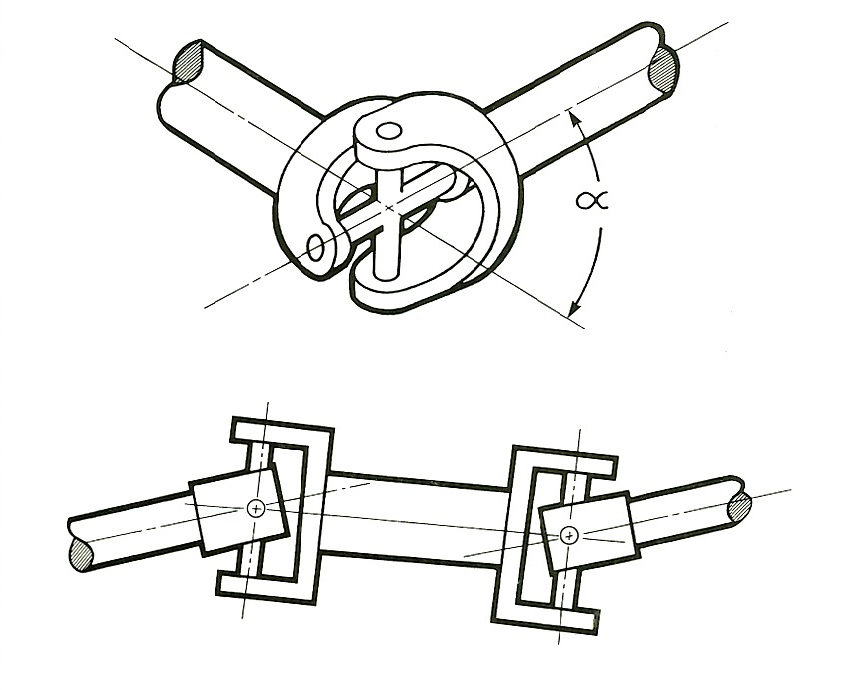
A Hooke's joint is a single-joint shaft coupling capable of compensating for angular misalignment when the axes of driving and driven shafts coincide at the fulcrum of the coupling. This type of design cannot compensate for lateral misalignment or accommodate any axial compliance. It is not a constant-velocity shaft coupling, since it has an inherent cyclic error occurring twice per revolution, changing the output velocity and causing torsional vibration at high speed.
Cardon coupling
The Cardan coupling consists of two Hooke's joints connected by a shaft. The design compensates for lateral misalignment, whilst providing a constant velocity drive, but it cannot accept angular misalignments between shafts as these cause cyclic errors. In the case of lateral misalignment, the driving and driven shaft move in unison, but the central shaft must constantly change speed to compensate for the cyclic errors of the two Hooke’s joints. This can cause vibration at high speed. By incorporating a sliding telescopic joint in the central shaft (e.g.spline) means to prevent twisting and may enable some angular compliance as well as enable the coupling to accommodate end play. However, this set up ultimately introduces backlash and other penalties to the system.In general, it may be said that an accurately made Cardan coupling is expensive to produce and that simpler, more appropriate couplings are available for use with encoders and similar positional instruments.
 Double diaphragm disc coupling
Double diaphragm disc coupling
The double diaphragm coupling is a variant of the Cardan coupling and, like its parent, delivers a constant velocity drive in cases of parallel misalignment, but without cyclic errors if angular misalignment is also present. Backlash and hysteresis are low, but only small misalignments may be accommodated, including a limited amount of axial float. If the coupling is misapplied and overstressed, the diaphragms may fatigue at their points of attachment.There are several couplings which may be considered as deriving from the double diaphragm type, including designs with multiple diaphragms, each with multiple points of attachment and sometimes moulded in flexible plastic. In others, bonded discs of elastomer material replace the diaphragms.
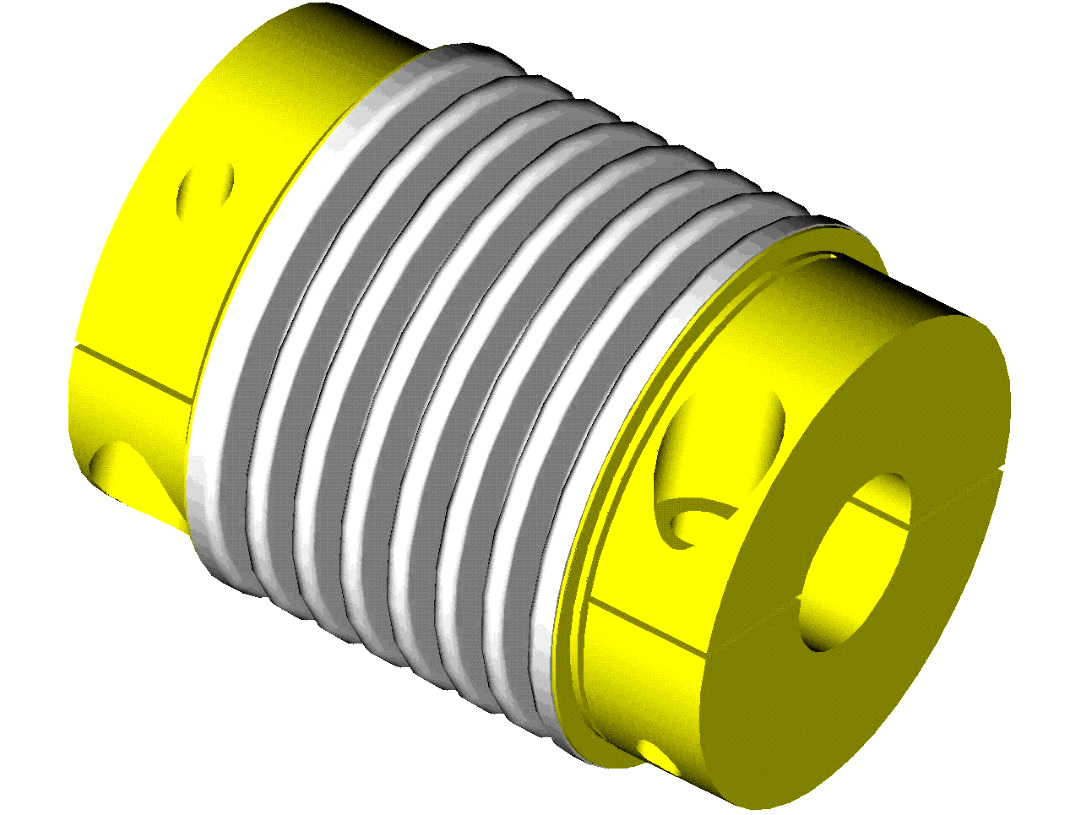 Bellows coupling - The bellows coupling has been in use for over 60 years and is one of the most satisfactory designs for use with encoder drives. The design combines high torsional rigidity, angular flexibility, axial compliance, and will accommodate an amount of parallel misalignment depending on the number of its bellow convolutions. It also offers low moments of inertia and can transmit rotary motion without cyclic errors or backlash. Pit falls of the design can that the bellows material homogeneous is of uniform thickness, and is used well within its elastic limit. In general, it is more robust and capable of transmitting more torque at greater shaft offsets. In this respect, it is claimed that electrodeposited nickel bellows provide superior characteristics. Bellows couplings are somewhat vulnerable to external physical damage; for example the careless use of hand tools during maintenance or assembly work can cause abrasions or dents that would degrade performance.
Bellows coupling - The bellows coupling has been in use for over 60 years and is one of the most satisfactory designs for use with encoder drives. The design combines high torsional rigidity, angular flexibility, axial compliance, and will accommodate an amount of parallel misalignment depending on the number of its bellow convolutions. It also offers low moments of inertia and can transmit rotary motion without cyclic errors or backlash. Pit falls of the design can that the bellows material homogeneous is of uniform thickness, and is used well within its elastic limit. In general, it is more robust and capable of transmitting more torque at greater shaft offsets. In this respect, it is claimed that electrodeposited nickel bellows provide superior characteristics. Bellows couplings are somewhat vulnerable to external physical damage; for example the careless use of hand tools during maintenance or assembly work can cause abrasions or dents that would degrade performance.
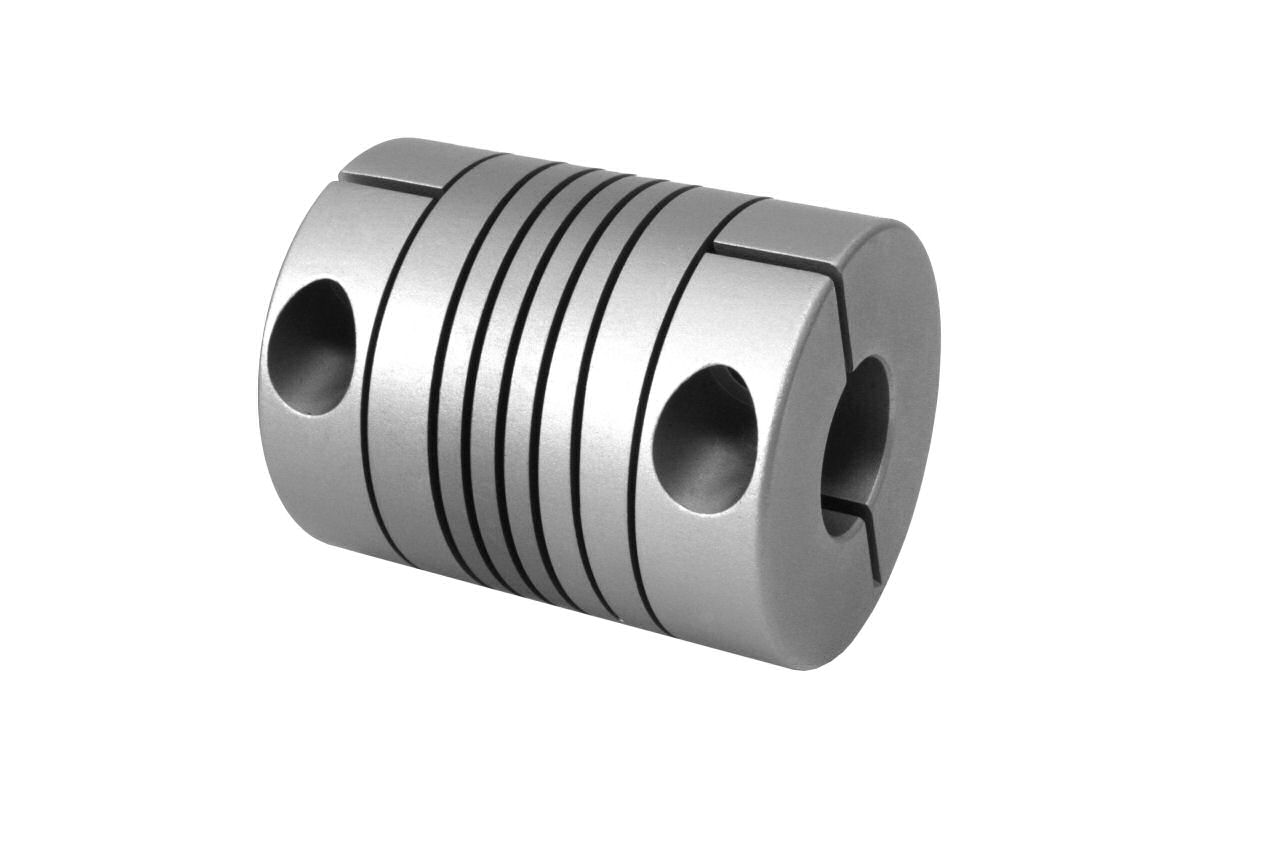 Helical Beam coupling - Helical couplings have been in existence for over 50 years are made in one piece, machined from a bar of aluminium alloy or austenitic stainless steel, to ensure uniformity of flexural spring rate for all angles of rotation. The centre of the bar stock is bored out and a helical slit or slits are cut from the outer surface, through to the bore, so that the coupling resembles a flat helical spring of ribbonlike cross section. The Helical beam coupling has very similar characteristics to the bellows coupling and like it, is available in a variety of styles. Where the Helical beam shaft coupling excels in the connection of rotary positional devices is its ability to provide a range of torsional stiffnesses for a given diameter. The coupling also offers the designer the chance to design unique end attachments into the single piece design often allowing the part to be multifunctional. No other coupling can achieve this tunability.
Helical Beam coupling - Helical couplings have been in existence for over 50 years are made in one piece, machined from a bar of aluminium alloy or austenitic stainless steel, to ensure uniformity of flexural spring rate for all angles of rotation. The centre of the bar stock is bored out and a helical slit or slits are cut from the outer surface, through to the bore, so that the coupling resembles a flat helical spring of ribbonlike cross section. The Helical beam coupling has very similar characteristics to the bellows coupling and like it, is available in a variety of styles. Where the Helical beam shaft coupling excels in the connection of rotary positional devices is its ability to provide a range of torsional stiffnesses for a given diameter. The coupling also offers the designer the chance to design unique end attachments into the single piece design often allowing the part to be multifunctional. No other coupling can achieve this tunability.
In conclusion, there are some practical considerations for selecting a coupling for positional encoder applications. Always design for the minimum possible misalignment between the driving and driven shafts. The less compensation the coupling has to provide, the better the job it will do and the loads on the encoder’s bearings will also be reduced. Both shafts should be close fits in the couplings. Loose fits promote imbalance and degrade performance. Remember that at some time the coupling or encoder will have to be removed for maintenance purposes, etc, so that too permanent methods of attachment should be avoided. These include the use of anaerobic jointing compounds, grub screws that deform the surface of the shafts they secure, and force-fits. The use of excessive force when dismantling can damage the shafts and bearings of associated components, not least in the encoders.
